
Pár slov úvodem

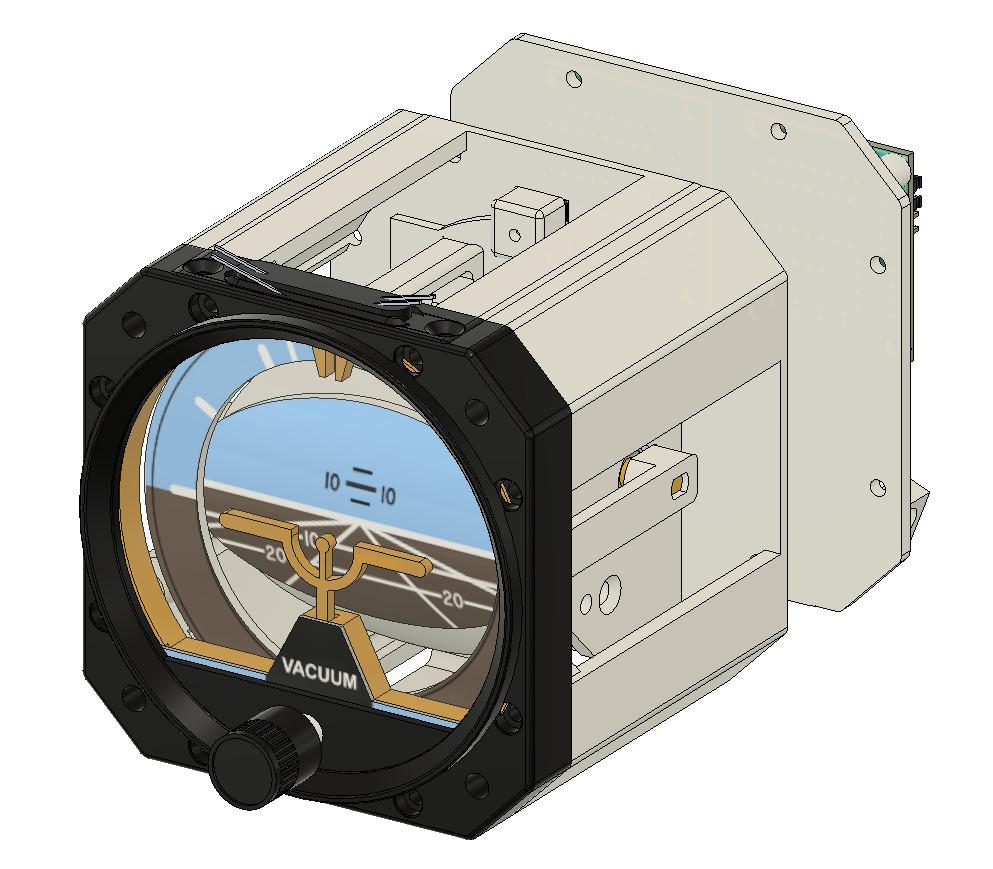
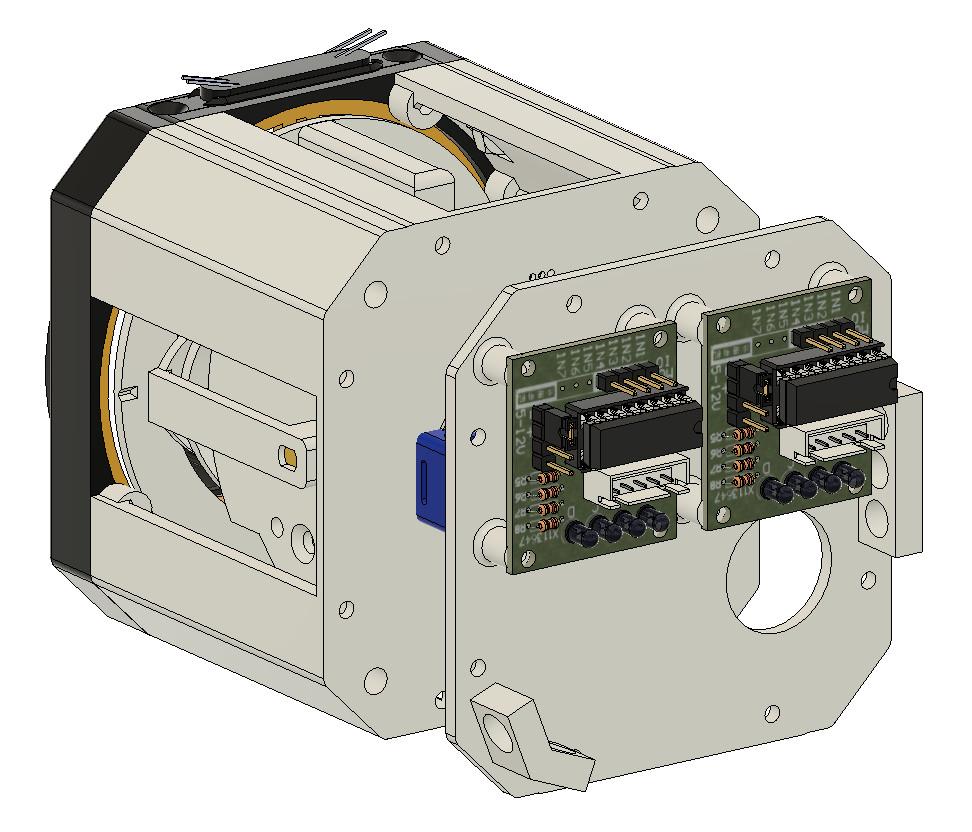
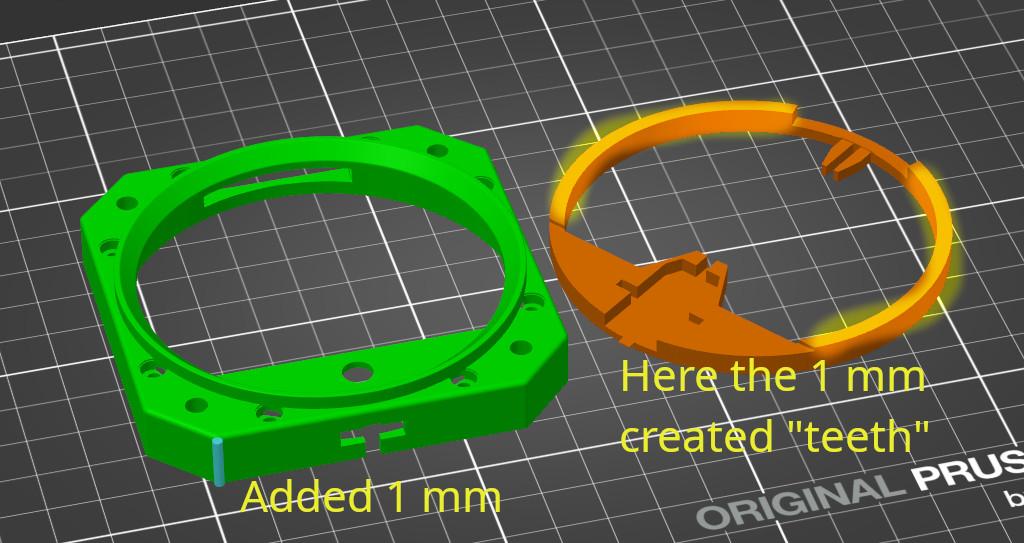
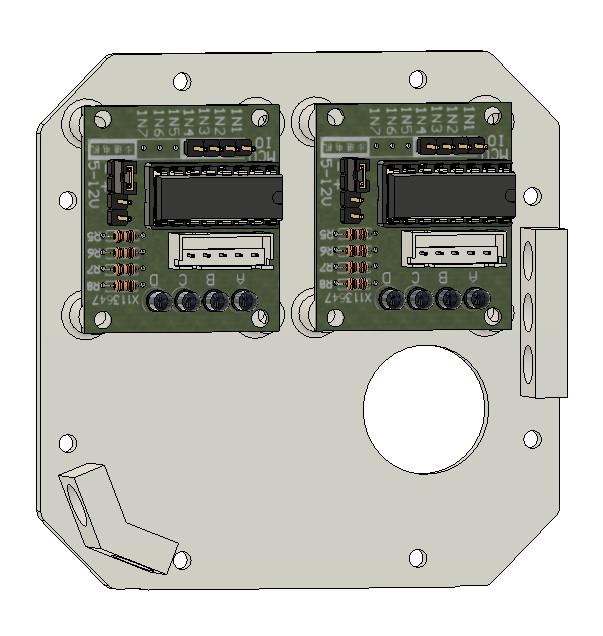
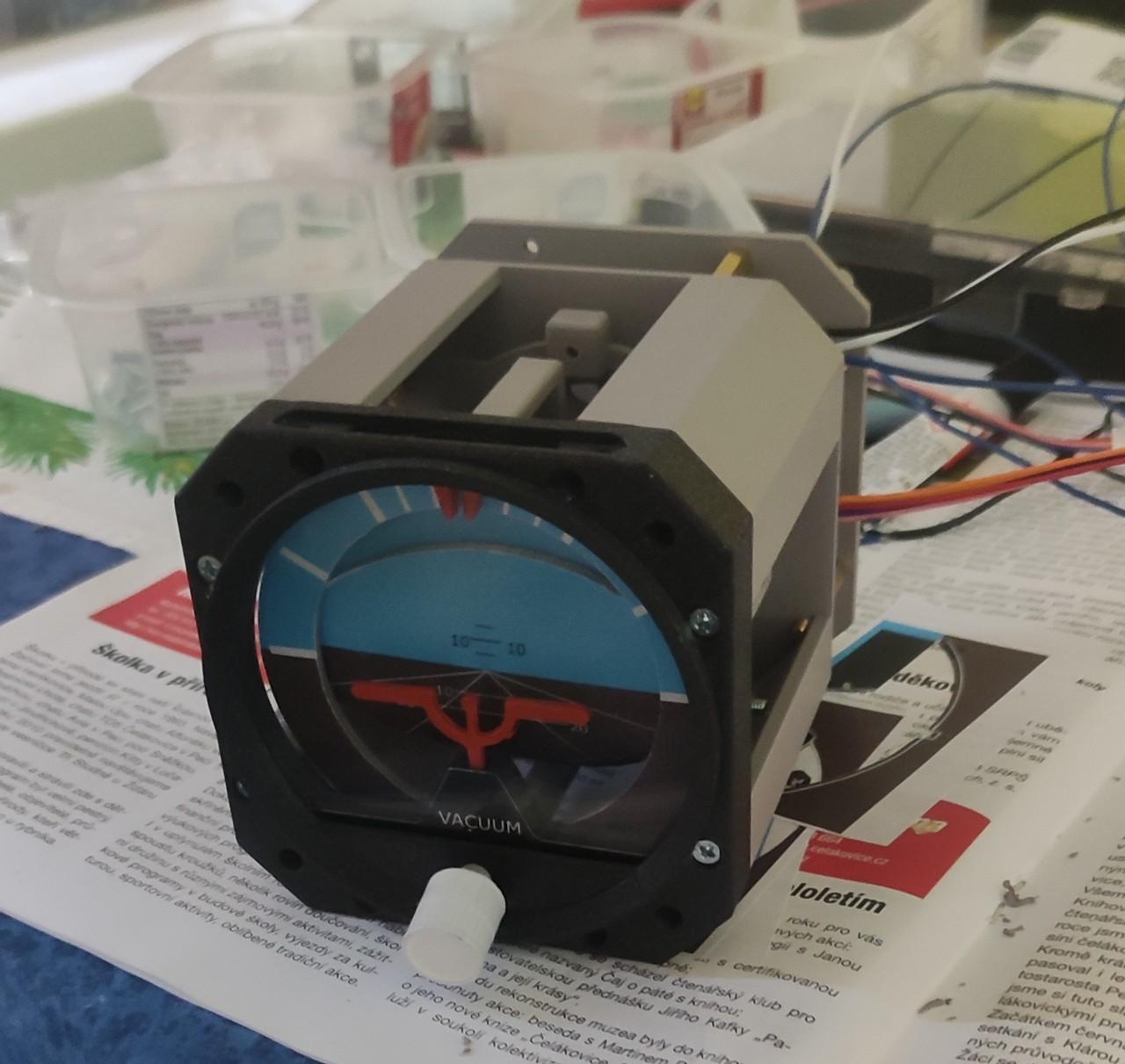
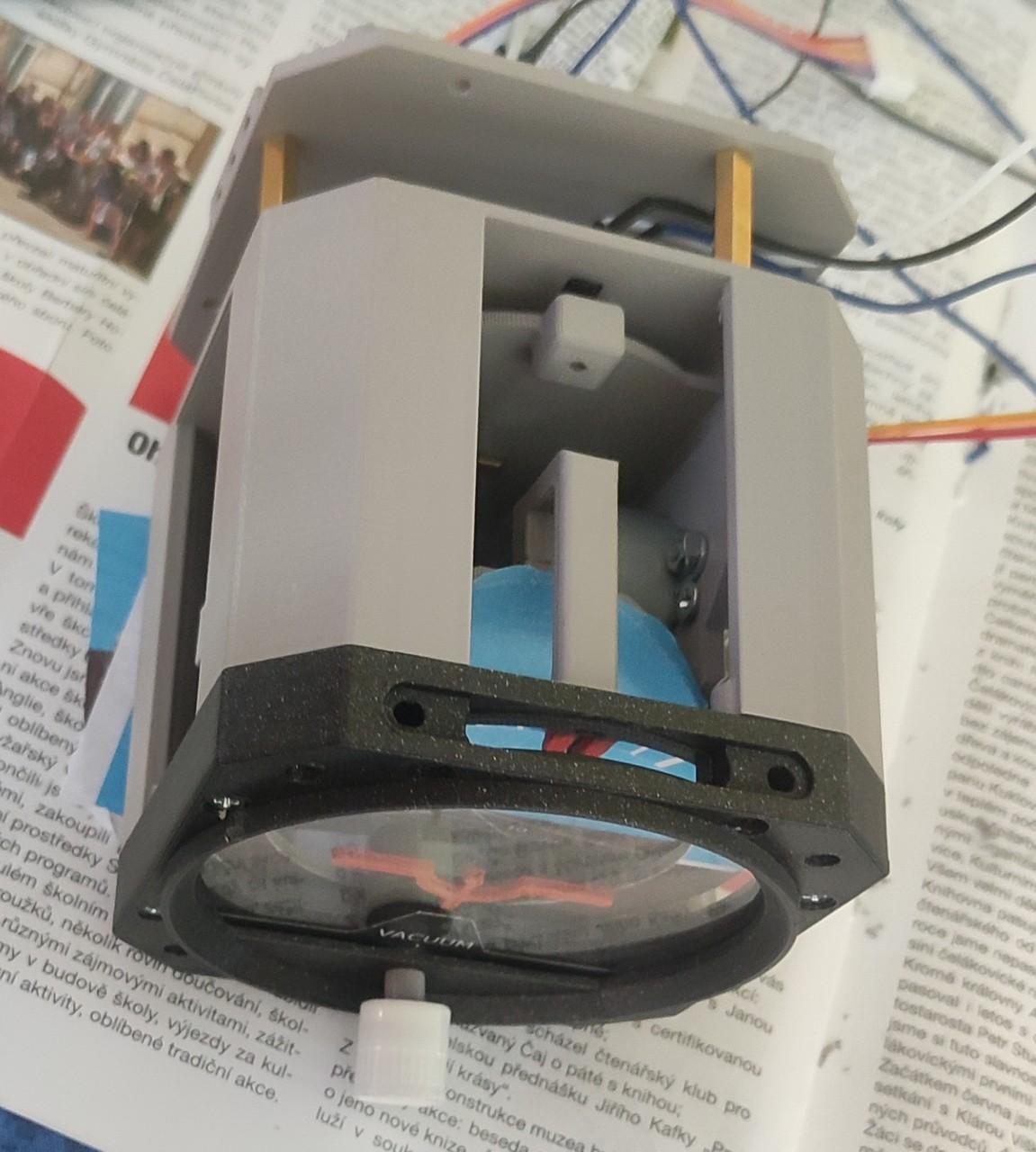
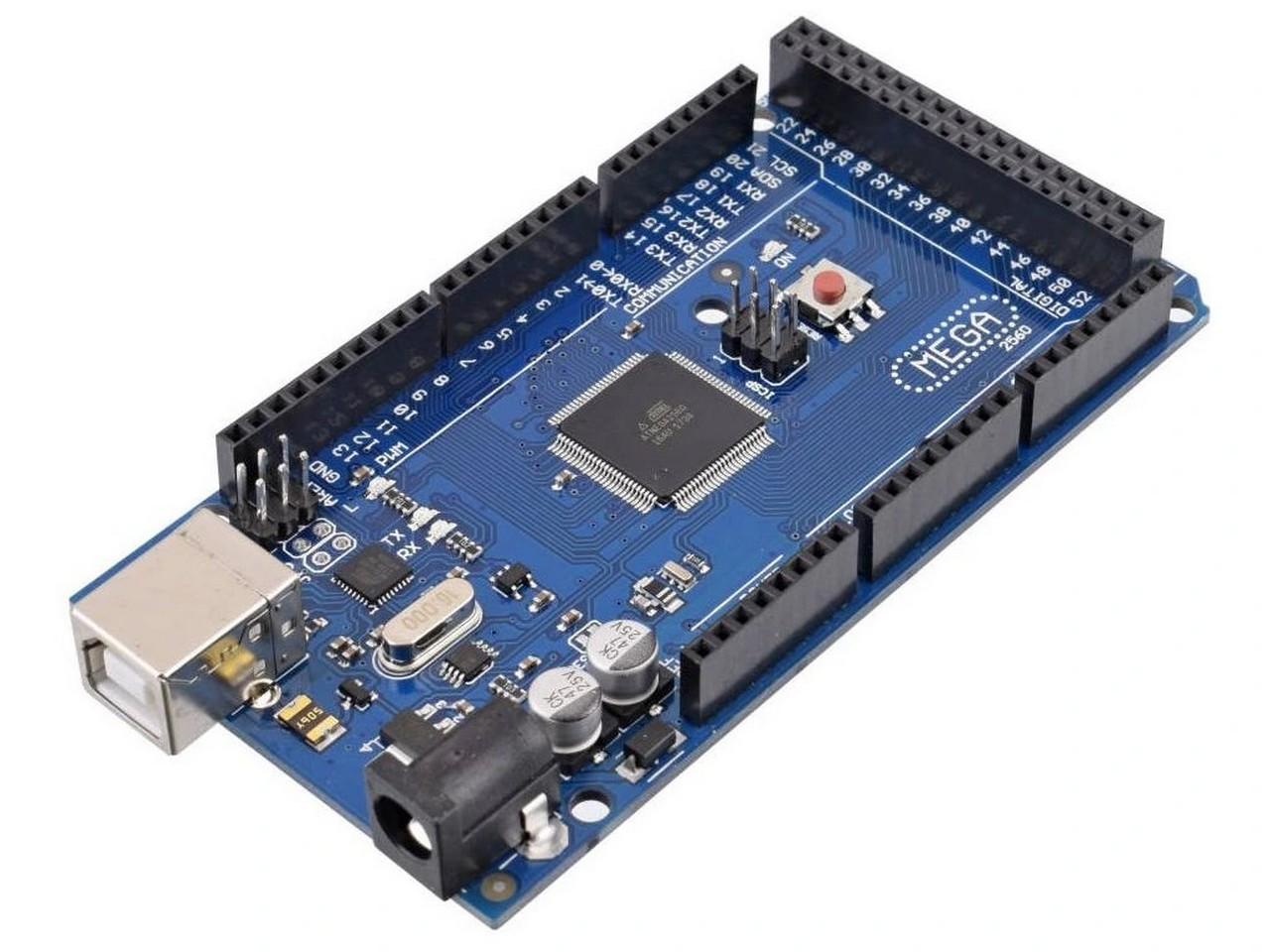
Tento budík je prostředním v mém panelu záložních přístrojů a také jsem ho zkompletoval jako prostřední, tedy druhý v pořadí. Toto byl první přístroj, kde jsem u originálního modelu od Kapitána Boba narazil s 3mm krycím plexisklem (následně pak i u dalších přístrojů). To si vyžádalo menší úpravu hloubky čelního rámečku / lunety a souvisejících dílů. Zde mi stačil 1mm a ano, opětovný tisk dílů kvůli 1mm umí malinko počechrat nervy :). Srdcem umělého horizontu jsou dva krokové motory 28BYJ-48 a jejich řídící elektronické desky ULN2003. Stejně jako v případě výškoměru jsem si pro tuto řídící elektroniku navrhl desku, ke které je mohu přišroubovat a to celé pak zase na distančním sloupcích přišroubovat k umělému horizontu, aby se to neválelo nazdařbůh někde jinde v kokpitu. Tak alespoň nějaká přidaná hodnota.
Umělý horizont jsem si po počátečních testech v rámci opakování rozebral ještě jednou, protože se mi samozřejmě podařilo dát jeden z magnetů, který by měl v kombinaci s Hallovým senzorem sloužit k automatickému nastavení nulové polohy, dát obráceně. Už jsem ho měl přilepený, takže to šlo celkem dobře. Ale co už, ten perfekcionismus mám asi trochu zděděný a nezbavím se ho. Určitě vás pobaví, že to automatické nastavení nulové polohy nakonec v MobiFlight u tohoto přístroje nevyužívám, protože to tam zatím funguje tím způsobem, že MobiFlight začne točit krokovým motorem dokud nesepne nastavený spínač, v tomto případě Hallův senzor. Jenže, umělý horizont je mechanicky omezen na pohyb jen v určitém rozsahu stupňů, ani jeden z krokových motorů se tak nemůže otočit o celých 360. Nemůže tedy nulovou polohu stejně nikdy najít protože dřív narazí na jeden z koncových limitů. Ale je to tam připravené, pro případ, že třeba v budoucnu přibyde možnost nadefinovat směr a limity hledání nulové hodnoty.
Zdrojový projekt pro Autodesk Fusion, 3D modely pro tisk i odkazy na původní video návod od Kapitána Boba najdete níže.
Galerie
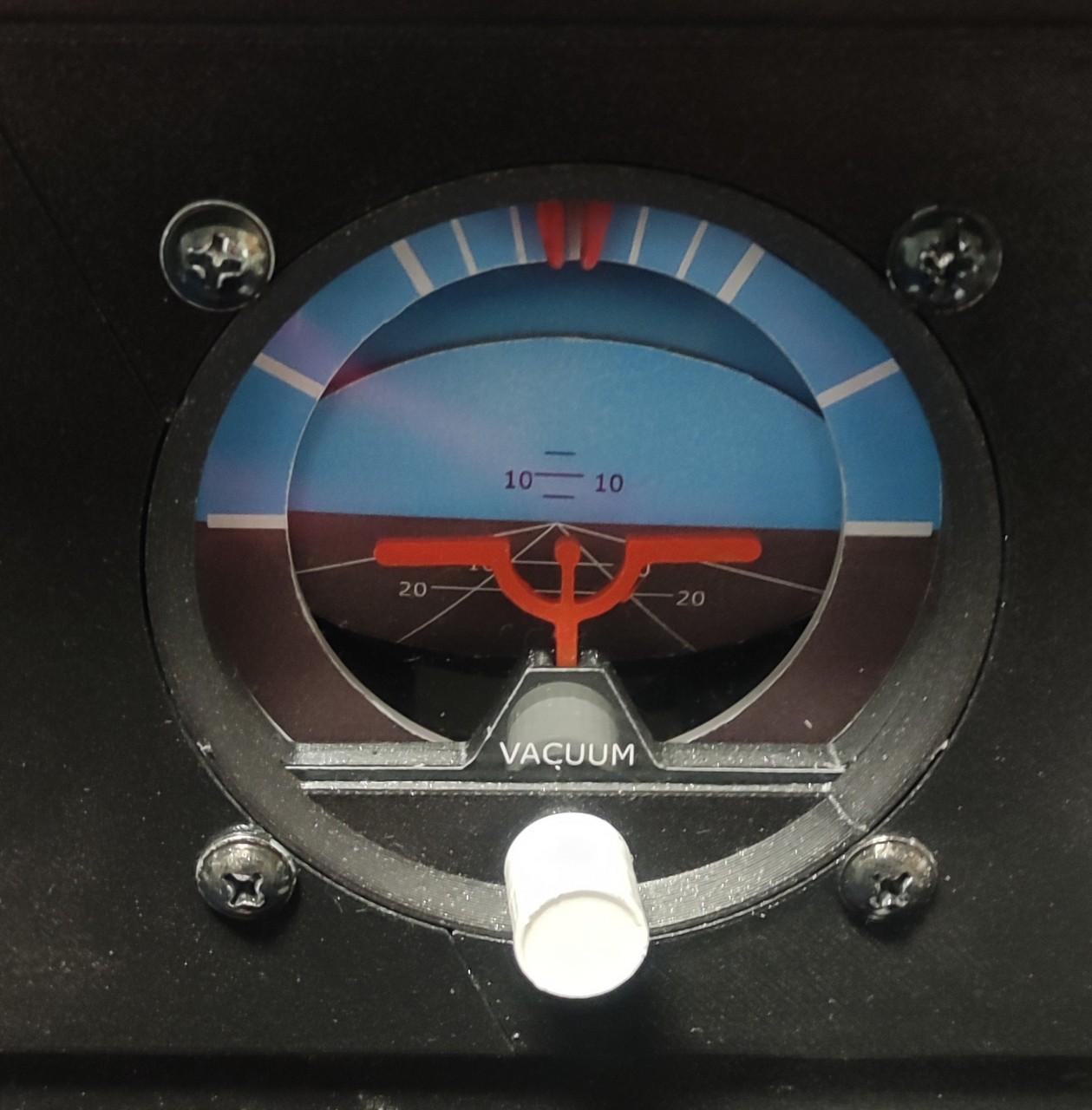
Popis je dobrá věc, ale obrázek je prostě fajn:
Zapojení
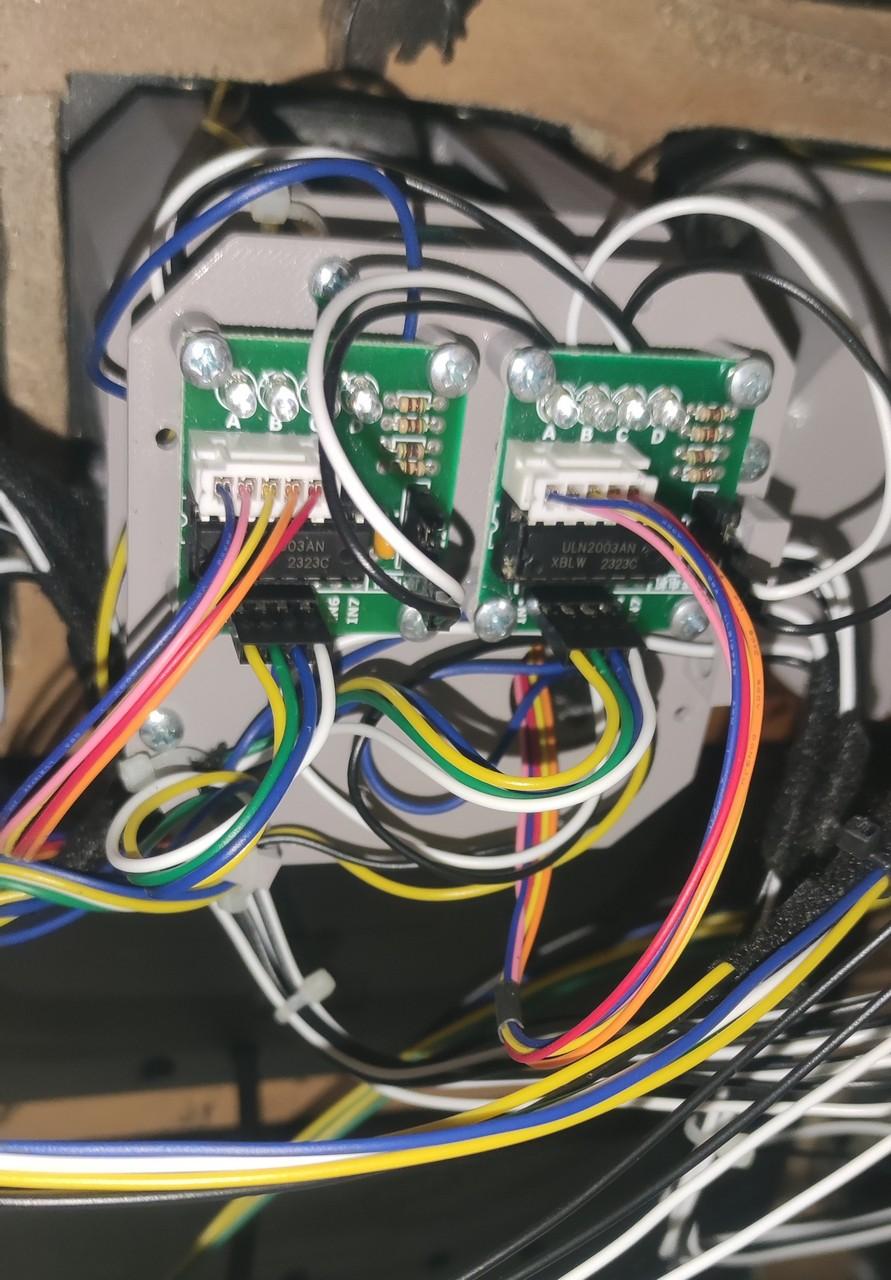
Níže je obrázek zapojení umělého horizontu.
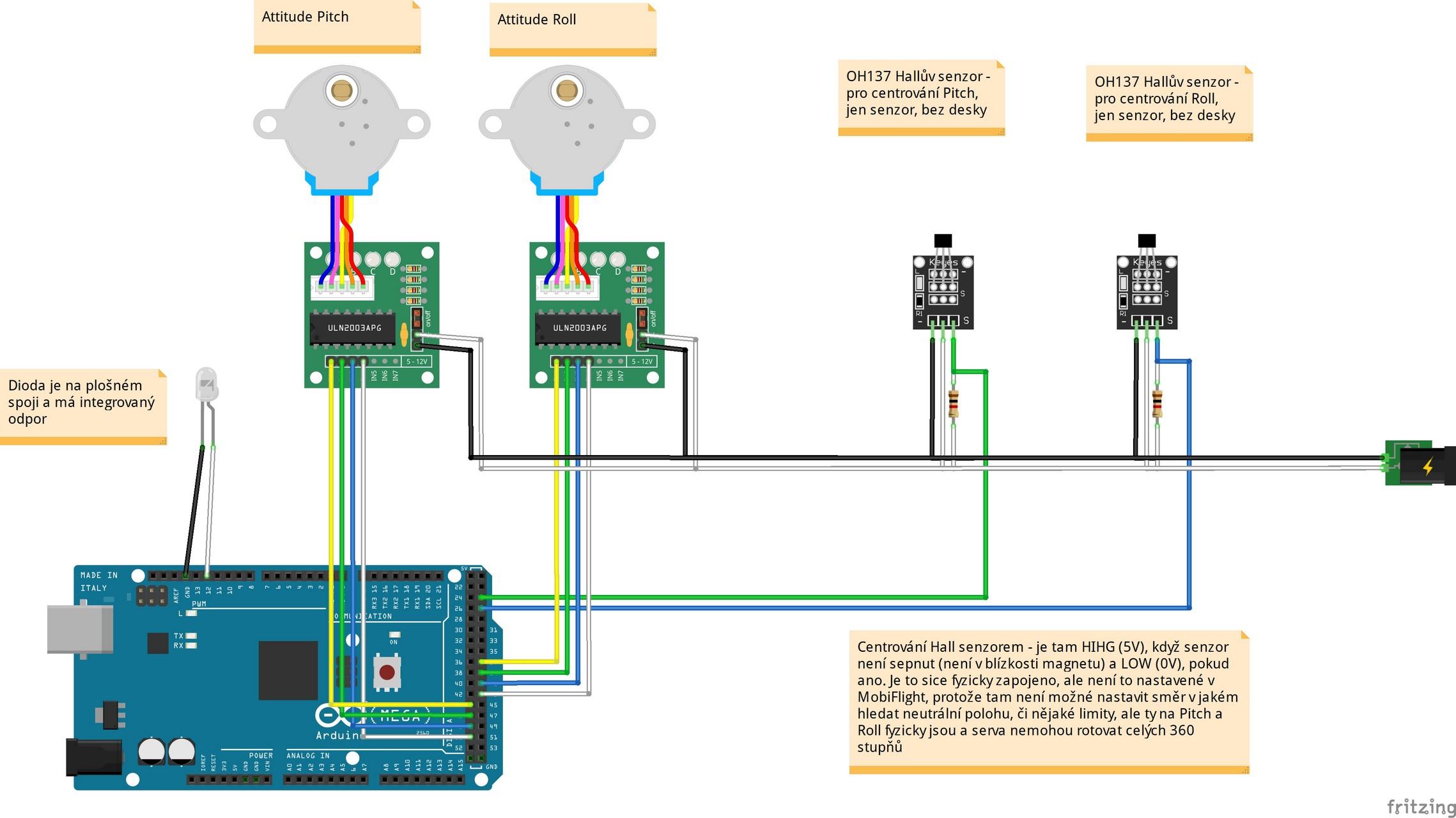
Nejde o nic tak složitého. LED dioda pro osvětlení přístroje má anodu (bílý kablík) zapojenou na PWM výstup desky Arduino Mega a katodu (černý kablík) na zem. Jedná se o malou LED diodu na plošném spoji, kde je intengrován i odpor. Zde stačilo jen propojit ji kabely s Arduinem.
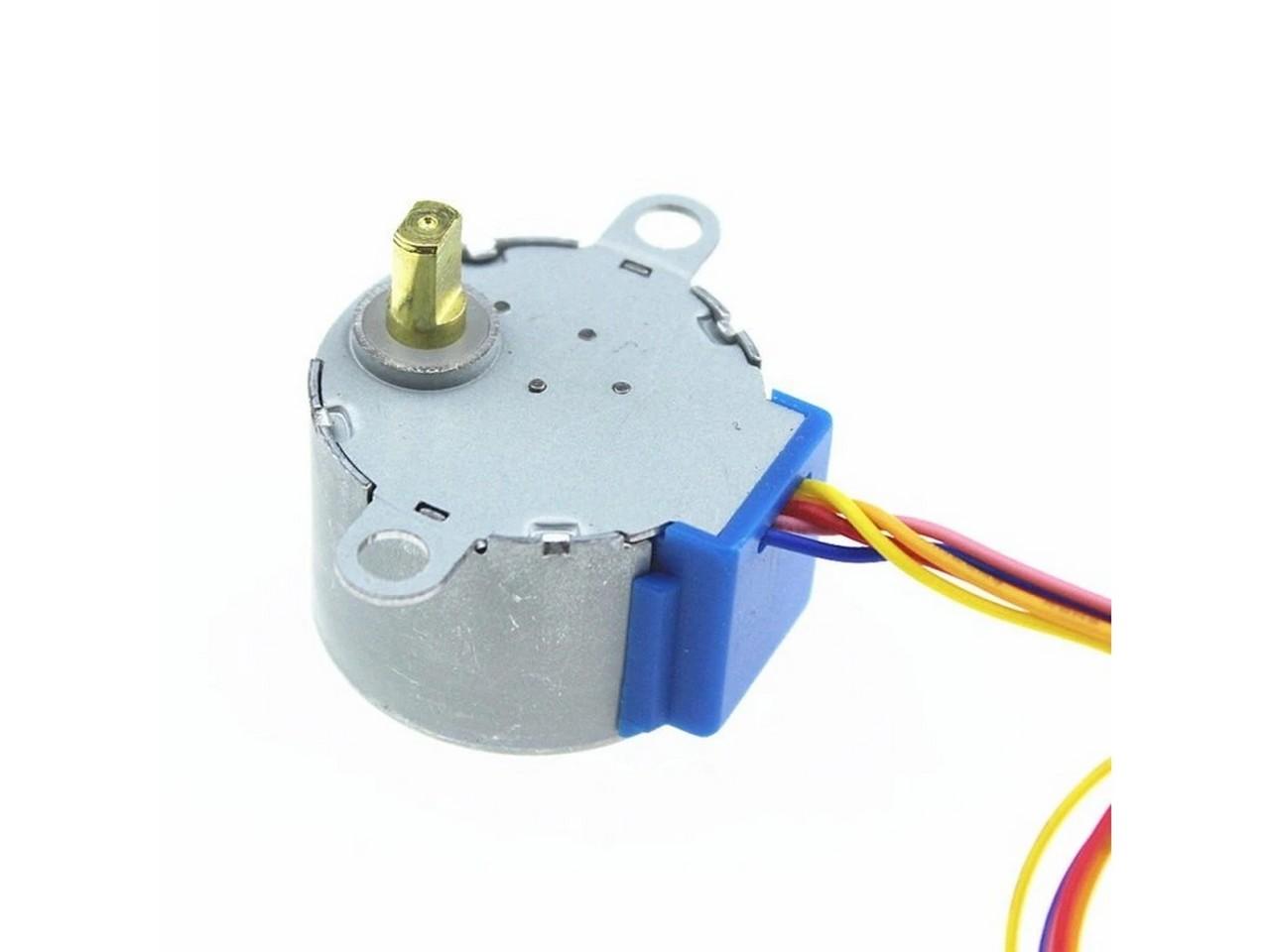
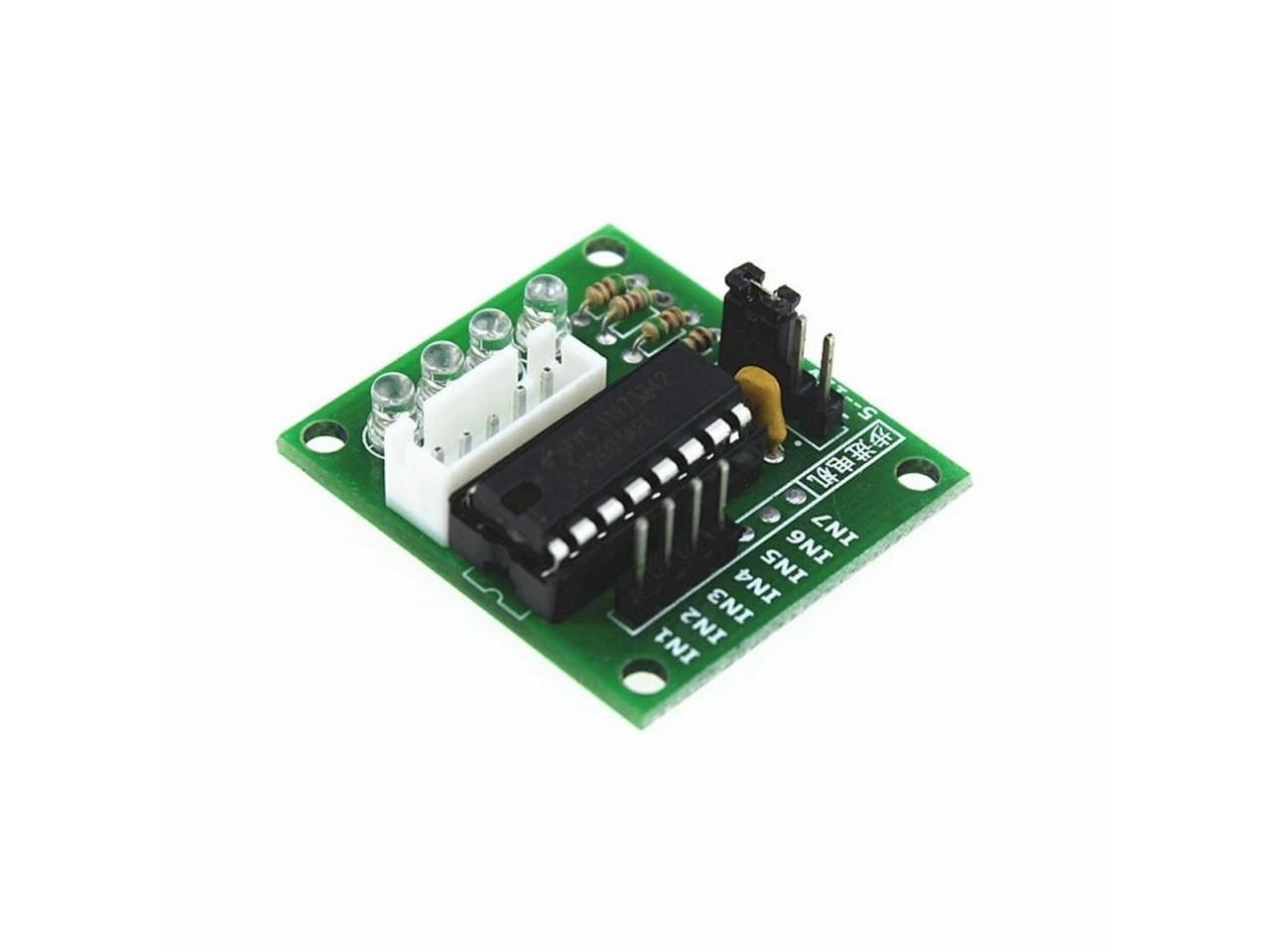
Dále umělý horizont používá dva krokové motorky 28BYJ-48, které bývají součástí většiny Arduino kitů. Arduino tyto motorky řídí skrze řadiče ULN2003 nebo jiné podobné. Jeden motor řídí náklon doleva a doprava a druhý náklon nahoru a dolů. Motor se propojí s řadičem a ten je čtveřicí vodičů propojen s Arduinem. Řadič také vyžaduje napájení. Lze ho napájet Arduinem, ale to by to s přibývajícím počtem komponent brzy nezvládlo. Já jsem tedy použil 5V z počítačového zdroje. Barvy kablíků vedoucí od obvodů ULN2003 do Arduina nejsou nijak důležité, šlo spíš o takovou nějakou moji konvenci (IN1 – žlutá, IN2 – zelená, IN3 – modrá, IN4 – bílá) , kterou jsem možná ne ve všech případech dodržel.
Na obrázku je také zapojení hallových senzorů (typ OH137), které mají společně s neodymovými magnety sloužit k detekci nulové polohy každé z os. Hallův senzor má 3 kontakty: „Ground“ (černý kablík) je připojený na zem, „Power“ (bílý kablík) na zdroj napájení 5V a „Signal“ vyšle impulz když senzor detekuje magnetické pole. Ten je připojen jednak na 5V (bílý kablík) přes 1kΩ odpor a také na vstup Arduina (barevné kablíky). Když tedy senzor detekuje magnetické pole, je na tomto výstupu 0V (LOW), v opačném případě pak 5V (HIGH).
Na schématu zapojení si také můžete všimnout propojení pinu GND z Arduina se záporným pólem (takže také GND) externího zdroje. Propojení GND pinů všech obvodů je důležité pro vytvoření společného referenčního bodu, což umožňuje správnou komunikaci a fungování všech zařízení. Bez společné země mohou signály být špatně interpretovány, což vede k nesprávné funkci. Správné uzemnění také snižuje elektrický šum a zlepšuje stabilitu a bezpečnost obvodů. Prakticky to mám řešené propojením GND výstupu z PC zdroje s GND pinem na Arduino. Popsáno je to v kapitole 2 – Přepínače, hejblátka a tak podobně.
Níže ještě galerie s použitýmí součástkami…snad poslouží k nalazení alternativ, až za pár měsíců nebudou odkazy níže platné 🙁


Programování
Programování popisuje Kapitán Bob ve svých videích, na které naleznete odkaz níže mezi Odkazy. Co se týká zprovoznění LED diody pro osvětlení přístroje, to popisuji u Kompasu. Zde to funguje úplně stejně.
Ke stažení
Níže si můžete stáhnout archiv s mými modifikovanými soubory umělého horizontu:
Pokud chcete jen panely pro namotnování elektroniky k přístrojům:
A soubory pro tisk přístrojového panelu:
Programování MobiFlight celého kokpitu:
Odkazy
Začněme odkazy na zdroje od Kapitána Boba….
- Videonávod na sestavení umělého horizontu od Kapitána Boba
- Web Kapitána Boba
- Projekt Cessna 172 Kapitána Boba na Githubu
- Zdrojové soubory Kapitána Boba pro umělý horizont na Githubu
A pár odkazů na použité součástky:
- Arduino Mega2560
- 2x Krokový motor 28BYJ-48
- 2x Řadič ULN2003 pro krokový motor
- 2x Nanjing Ouzhuo Tech OH137 Hallův senzor, TO-92
- 2x Neodymový magnet hranol 3x3x1 mm, N50, poniklovaný – aby měl hallův senzor na co reagovat
- 2x odpor 1kΩ
- 3V-5V 40mA SMD bílý LED modul pro Lilypad
A použitý software:
Všechny díly série:
- Můj “domácí kokpit”
- Přepínače, hejblátka a tak podobně
- Přístrojový panel – Hodiny DAVTRON
- Přístrojový panel – Rychloměr
- Přístrojový panel – Umělý horizont – tenhle díl 🙂
- Přístrojový panel – Výškoměr
- PFD & MFD
- ELT Panel
- Kompas
- Ventilace
- Závěr první fáze, shrnutí, a poděkování
Změny v tomto článku
12.11.2024 – Do kapitoly Zapojení přidán odstavec o připojení pinu GND Arduina k externímu zdroji, aby se vytvořila společná zem mezi všemi komponenty (což je docela důležité a já to tam neměl). Aktualizováno bylo i schéma zapojení.